
MOTORES DC (Corriente continua)
Motor rectangular 3 a 6VDC

📂Disponibilidad: Si
Características:
- Motor DC sin engranajes
- Eje liso de 8.5mm
- Cuerpo metálico
- Voltaje de trabajo: 3VDC - 6VDC
- Velocidad sin carga: 3,000 RPM (6VDC)
- Corriente consumo sin carga: 0.07 A
- Corriente consumo con carga: 0.35 A



Motor cilíndrico 3 a 6VDC

📂Disponibilidad: Si
Características:
- Motor DC sin engranajes
- Eje liso de 10mm de largo
- Cuerpo metálico
- Voltaje de trabajo: 3VDC - 6VDC
- Velocidad sin carga: 2,400 RPM (6VDC)
- Dimensiones: 25mm (largo) x 21mm (diámetro)
- Corriente consumo sin carga: 0.05 A
- Corriente consumo con carga: 0.24 A
Soporte para motor DC 20mm

📂Disponibilidad: Si
Característica:
- Cuerpo plástico PP
- Agujero para colocar tornillo
- Dimensiones: 25x26.5x11mm
- Compatible con motor rectangular 3-6VDC y motor cilíndrico 3-9VDC
- Compatible con otros motores cercanos a los 20mm

Motor DVD 6VDC

📂Disponibilidad: Si
Características:
- Voltaje de operación: 5.9Vdc (pero funciona con un rango 5V a 6V DC)
- Diseñado para equipo: CD/DVD-ROM
- Torque: 0.48 mN·m o 4.9 g·cm
- Potencia: 0.14W
- Longitud del cable: 7 cm
- Sin carga Velocidad: 3500 r/min
- Diámetro: 24mm
- Alto solo del motor: 12.3mm
- Alto con soporte: 24mm
- Sin carga Corriente: 0.022 A Sin carga


Motor cilíndrico 6 a 12VDC

📂Disponibilidad: Si
Características:
- Motor DC sin engranajes
- Eje liso de 6mm de largo
- Cuerpo metálico
- Voltaje de trabajo: 6VDC - 12VDC
- Velocidad sin carga: 4,800 RPM (9VDC)
- Dimensiones: 32mm (largo) x 24mm (diámetro)
- Corriente consumo sin carga: 0.09 A
- Corriente consumo con carga: 0.30 A


Motor cilindrico mediano 9 a 12VDC

📂Disponibilidad: Si
Características:
- Motor DC sin engranajes
- Eje liso de 14mm de largo
- Cuerpo metálico
- Voltaje de trabajo: 9VDC - 12VDC
- Velocidad sin carga: 6,500 RPM (12VDC)
- Dimensiones: 35mm (largo) x 28mm (diámetro)
- Largo del eje: 13mm (eje liso)
- Corriente consumo sin carga: 0.50 A
- Corriente consumo con carga: 1.60 A


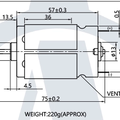
Motor Cilíndrico 12V 25W 58x37mm
📂Disponibilidad: Si
Características:
- Marca: Mabuchi 555
- Corriente de trabajo: 2A
- Voltaje de operación: 12VDC
- Potencia nominal: 25W
- Rango del voltaje de trabajo: 9VDC hasta 20VDC
- El motor inicia a girar desde 3V
- Velocidad sin carga: 5,500 RPM @ 280 mA
- Torque: 380 g-cm (5.3 oz-in)
- Armadura de 5 polos utiliza imanes permanentes, por lo que el motor produce un alto par con alta eficiencia
- El montaje se simplifica mediante tres orificios de montaje de 3 mm en la cara del motor
- Eje liso con muesca, ver fotografía
- Dimensiones de cuerpo: 58mm de largo x 37mm de diámetro
- Peso: 220 gramos
- Este motor puede funcionar a la inversa, como generador, muy utilizado en maquetas escolares, entre mas rápido haga girar el eje mas voltaje puede haber en sus terminales



Mini Motor N20 caja reductora

imágenes ilustrativas, el motor es mas pequeño, la imagen posee aumento
📂Disponibilidad: Si
Características:
- Mini Motor individual con caja de engranajes, también conocido motorreductor
- Voltaje máximo: 12VDC
- Caja reductora con engranajes metálicos
- Voltaje de trabajo optimo: 9 a 12 VDC
- Velocidad, sin carga: 100 RPM (12V)
- Relación: 48:1
- Corriente de consumo sin carga: 90mA (max. 120mA)
- Largo total del motor: 36mm
- Diámetro total del motor: 12mm
- Largo del eje: 10mm
- Diámetro del eje: 3mm
- Muy utilizado en proyectos para robots moviles, por ejemplo, seguidores de linea, de luz, entre otros
- Disponible llantas para este motor, delgada y gruesa, se venden por separado





imágenes ilustrativas, el motor es mas pequeño, la imagen posee aumento
Accesorios para motor N20
Los accesorios se venden individualmente y funcionan unicamente con el motor N20
| Accesorio | Disponibilidad |
| Llanta delgada 34mm | Pocas unidades |
| Llanta gruesa 43mm | Pocas unidades |
| Soporte para motor con tornillos | Pocas unidades |
| Rueda giratoria (llanta loca / soporte) | Pocas unidades |











Motor con Caja Reductora 3 a 6VDC

📂Disponibilidad: Si
Características:
- Motor individual con caja de engranajes, tambien conocido motorreductor
- Voltaje maximo: 6VDC
- Velocidad: sin carga: 90 +/-10 RPM (3.5V)
- Relación: 48:1
- Corriente de consumo sin carga: 190mA (max. 250mA)
- Torque: 800 gf.cm
- Carga que soporta: 2 libras (entre dos motores en caso de realizar un robot movil)
- Stall current: aprox. 1A
- El motor incluye rueda
- Dimensión motor: 70mm x 22mm x 18mm
- Muy utilizado en proyectos para robots moviles, por ejemplo, seguidores de linea, de luz, entre otros




Guatemala Motor DC Moto reductor