
CIRCUITO DE POTENCIA
En este punto el comparador tiene en la salida un nivel alto (Vout>2.3V) ó nivel bajo (Vout <0.5V) es necesario que los motores giren cuando exista una fuente de iluminación sobre el robot (en las LDR específicamente) pero cada comparador del LM393 no posee la corriente suficiente para mover ambos motores y debido al tipo de salida se debe de agregar un par de elementos.
Los transistores que activaran cada motor corresponde a un TIP120, transistor NPN Darlington que soporta hasta 5A 60V, lo hace ideal para activar cada motor sin sobrecalentarse, pero debido al voltaje en la salida del comparador este transistor no puede ir conectado directamente al LM393, por esa razón se implementa un BC557, transistor PNP, que permite activar al TIP120 cuando exista una fuente de luz sobre los sensores (LDR).
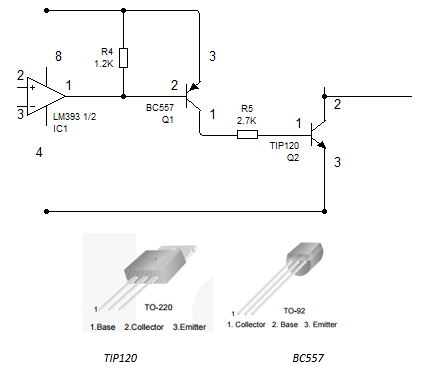
En ausencia de tensión de polarización en la base de cada transistor, las barreras de potencial entre emisor y colector varían su activación, es decir;
- Si el voltaje en la salida (Vout) del comparador es un nivel bajo el transistor BC557 PNP permitirá el paso de una corriente mayor, que va de emisor a colector, hacia el transistor TIP120 NPN activando de esta manera al motor
- Si el voltaje en la salida (Vout) del comparador es un nivel alto el transistor BC557 PNP NO permitirá el paso de una corriente hacia el transistor TIP120 NPN y de esta manera el motor permanecerá en reposo
MOTORES
Los motores que se utilicen en un robot móvil DEBEN TENER su respectiva caja reductora o engranajes (también conocidos como moto reductores) debido a su facilidad de uso y a su caja reductora, estos poseen un torque que soportan el peso del circuito, baterías y plataforma robótica. Estos necesitan un voltaje en sus terminales para girar y los hace ideales para este proyecto.

Cada motor posee un capacitor cerámico de 330nF así ayuda a reducir el ruido que este genera. En este proyecto se utilizaron moto reductores de 3 a 6VDC y poseen un consumo de 0.8A sin carga. Por otro lado, el diodo 1N4001 se conecta en paralelo para que no deje pasar la corriente “de rebote” generada por el motor y que esta queme el transistor. La fuente de alimentación para ambos motores es independiente al circuito electrónico de control y posee la corriente suficiente para que ambos funcionen al mismo tiempo.
