
ROBOT MOVIL SEGUIDOR DE LUZ
LDR + COMPARADORES DE VOLTAJE + TRANSISTORES

Descripción
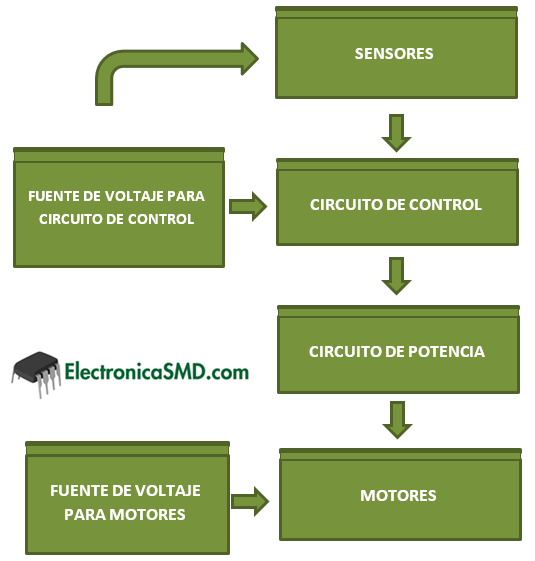
Consiste en crear un robot móvil seguidor de luz, implementando componentes electrónicos de uso básico. El robot móvil (carro robótico) posee dos LDR que perciben la luz y con ayuda de comparadores de voltaje les indican a transistores accionar dos motores DC, es decir, si van hacia adelante ó si realizan un giro derecha/izquierda. Para una mejor comprensión de este proyecto se muestra un diagrama de bloques:
Materiales
Componentes necesarios:
- 1 Batería de 9V
- 1 Conector para batería de 9V
- 2 Interruptores encendido/apagado
- 2 Capacitor electrolítico 10uF 16V
- 1 Regulador voltaje LM1084IT-5.0
- 2 Potenciometro precisión 20K
- 2 LDR 7mm (puede ser un poco más grande)
- 4 Resistencia 20K 1/4W
- 1 Comparador voltaje LM393
- 2 Resistencia 1.2K 1/4W
- 2 Transistor BC557
- 2 Resistencia 2.7K 1/4W
- 2 Transistor TIP120
- 2 Diodo 1N4001
- 2 Motores de 3 a 6 voltios con su respectiva caja reductora o engranajes (también conocidos como motor reductor)
- 2 Ruedas para los motores
- 1 Rueda libre ó rueda giratoria
- 2 Capacitor cerámico 330nF
- 1 Batería recargable de 7.4V 2600mAh con su cargador
-
- La batería de 7.4V puede ser sustituida por 4 baterías AA con su portabateria ó con 2 baterías 18650 3.7V con su portabateria
- 1 base plástica o de madera para montar baterías, circuito y motores (en electrónica SMD ofrecemos plataforma de 2 motores similares al del video, pregunte por ellos)
- 1 linterna de uso general de preferencia tamaño medio (diámetro entre 4 y 8 centimetros)
En caso de pasar el circuito a placa
- 1 Placa perforada 9x15cm ó similar (si realiza el circuito en PCB placa lisa de 10x10cm o similar)
- 4 terminales tipo bloque 2 tornillos
- 3 Disipadores pequeños para los transistores TIP120 y el regulador LM1084IT-5.0
- 2 metros alambre para protoboard
- 2 metros estaño
- 1 Cautin de 20W, 30W ó 40W
- Pinzas, corta alambre
Componentes opcionales en caso de usar protoboard
- 1 Protoboard de una galleta
- 2 metros alambre para protoboard
- Pinzas, corta alambre
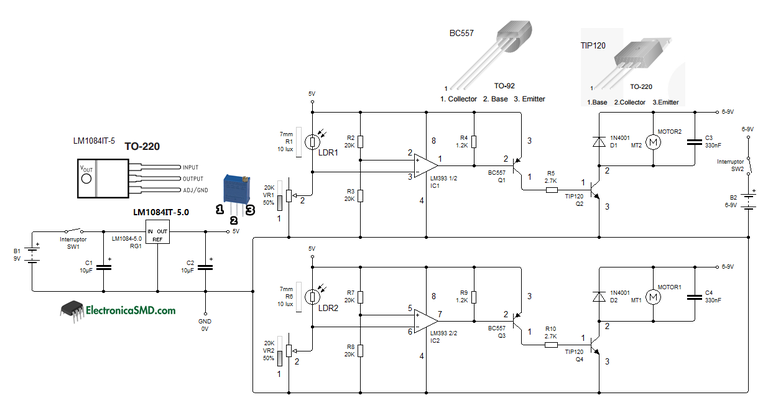
diagrama
condiciones de funcionamiento
Debido a que se utilizan dos LDR se cumplirán las siguientes condiciones:
Si ambas LDR son iluminadas
Si en ambas existe una cantidad considerable de iluminación (en este caso, proveniente de una linterna o lámpara) ambos motores giraran de tal manera el robot va en dirección de la luz.
Si LDR No. 1 recibe iluminación y LDR No. 2 no recibe iluminación
Si la LDR No. 1 es iluminada el motor No. 2 girara y el motor No. 1 se apagará, de esta manera se produce un giro haciendo que la LDR No. 2 vuelva a ser iluminada por la linterna y así ambos motores vuelvan a girar.
Si LDR No. 2 recibe iluminación y LDR No. 1 no recibe iluminación
Si la LDR No. 2 es iluminada el motor No. 1 girara y el motor No. 2 se apagará, de esta manera se produce un giro haciendo que la LDR No. 1 vuelva a ser iluminada por la linterna y así ambos motores vuelvan a girar.
Si ambas LDR NO son iluminadas
El robot seguidor de luz, pasara a modo de espera, quedando ambos motores inactivos.
Funcionamiento paso a paso
FUENTE DE VOLTAJE
Contamos con dos fuentes de voltaje, para el circuito de control y los motores. Los motores no importando el tipo, generan ruido lo cual puede afectar al circuito de control haciéndolo funcionar erróneamente.
La fuente de voltaje corresponde a una batería de 9V y un regulador LM1084IT-5.0 que disminuye el voltaje a 5VDC, este regulador es muy estable y lo hace ideal a este tipo de aplicación porque el “cerebro” de este robot es el comparador de voltaje LM393 y necesita de un voltaje fijo para realizar la comparación.

La fuente de motor, en este caso, consiste en una batería recargable de 7.4V 2600mAh suficiente para alimentar ambos motores sin que se descargue rápidamente. OJO; no es obligatorio utilizar este tipo de batería, se puede sustituir por 4 baterías AA ó 2 baterías 18650 de 3.7V, NO RECOMENDAMOS utilizar batería de 9V porque la mayoría posee corriente baja y se descargan rápidamente y si posee moto reductores de 3-6VDC estos pueden dañarse, deberá de tomarlo en cuenta al momento de conseguir los motores.
Nota importante: En el diagrama GND ó 0VDC de ambas fuentes están conectadas, porque ambas baterías no se encuentran aisladas físicamente. No olvidar conectar ambas “tierras” para evitar mal funcionamiento del circuito.